MEC多接入边缘计算及关键技术
456 浏览 5 years, 8 months
3.3 Connected Cars
版权声明: 转载请注明出处 http://www.codingsoho.com/The number of connected vehicles is rapidly growing and will continue to do so over the coming years. Communication of vehicles and roadside sensors with a roadside unit is intended to increase the safety, efficiency, and convenience of the transportation system, by the exchange of critical safety and operational data. The communication can also be used to provide value added services, such as car finder, parking location and to support entertainment services (e.g. video distribution).
As the number of connected vehicles increases and use cases evolve, the volume of data will continue to increase along with the need to minimize latency. Whilst data stored and processed centrally may be adequate for some use cases, it can be unreliable and slow for others. LTE can significantly accelerate the deployment of connected vehicle communications. LTE cells can provide “beyond the line of sight” visibility i.e. beyond the range of direct communication between vehicles of 300 – 500m. It can also satisfy the tight latency requirement of connected vehicle communications, below 100ms in some use cases. Messages could be distributed in real time over LTE, eliminating the need to build a countrywide Digital Short-Range Communications (DSRC) network. Cars can leverage their increasingly inbuilt LTE connectivity; in deployments where DSRC exists, LTE would be able complement it.
Mobile Edge Computing can be used to extend the connected car cloud into the highly distributed mobile base station environment, and enable data and applications to be housed close to the vehicles. This can reduce the round trip time of data and enable a layer of abstraction from both the core network and applications provided over the internet. MEC applications can run on MEC servers which are deployed at the LTE base station site to provide the roadside functionality. The MEC applications can receive local messages directly from the applications in the vehicles and the roadside sensors, analyse them and then propagate (with extremely low latency) hazard warnings and other latency-sensitive messages to other cars in the area (as depicted in Figure 5). This enables a nearby car to receive data in a matter of milliseconds, allowing the driver to immediately react.
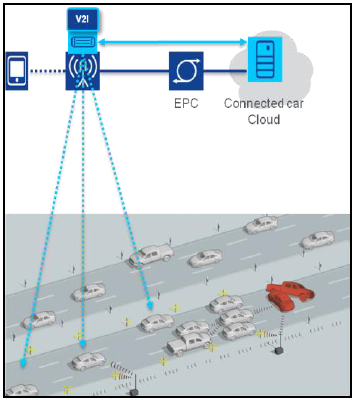
The roadside MEC application will be able to inform adjacent Mobile Edge Computing servers about the event(s) and in so doing, enable these servers to propagate hazard warnings to cars that are close to the affected area.
The roadside application will be able to send local information to the applications at the connected car cloud for further centralized processing and reporting.